前回に引き続き、「光ファイバーこま」です。
単3乾電池、130型モーター、12cmCD、ダイソーのLED電球を使用したバージョンです。
リポパック、12V 60mAモーター、8cmCD、イルミネーションLEDを使用したものは
こちらをご覧ください。

単3乾電池、130型モーター、12cmCD、ダイソーのLED電球を使用したバージョンです。
リポパック、12V 60mAモーター、8cmCD、イルミネーションLEDを使用したものは
こちらをご覧ください。

①
12cmCDの裏側から、シャフト2mmφ用のギアをホットボンドで貼り付けます。
CDの穴の側面を黒マジックで塗っておくと 貼るときに中心がわかりやすいです。
モーターシャフトに差し込むときは、この写真の面が上側になります。
CDの穴の側面を黒マジックで塗っておくと 貼るときに中心がわかりやすいです。
モーターシャフトに差し込むときは、この写真の面が上側になります。

②
モーターの両サイドに単3乾電池1個用の電池ケースをホットボンドで貼り
アイス棒で補強します。

裏側

③
配線をします。
取りあえず 電池1個使用バージョンです。
モーター~スイッチ~電池ケース1個のみを接続しています。
(最後の方で 足の長いコマを作っていますが、その場合は電池2個使用します。)
(最後の方で 足の長いコマを作っていますが、その場合は電池2個使用します。)

もう1個の電池ケースの配線は邪魔にならないように
適当なところに貼り付けました。

④
シャフトぎりぎりまでCDを差し込みます。

⑤
配線をした方の電池ケースには新品の電池を入れ、
回転チェックをしてみます。
(もう1個の電池ケースは使い切った電池でOK)
モーターにもよるのですが、ほとんどのモーターで
回転途中に電池が吹っ飛ぶと思います。
(私は4種類試して、うち3種類は吹っ飛びました。)
⑥
その対策として
本体側(電池ケース)にアイス棒を貼り付けます。
CDと本体は逆方向に回転しています。
(例えばCDが反時計回りに回転すると、本体は時計回りに回転します。)
このようにアイス棒を本体に貼ることで、
本体の回転を抑えることが出来ます。

ただ、本体の回転速度が遅すぎると、
光ファイバーが遠心力で広がりにくくなるので適当な長さに調整します。
上の写真の半分くらいの長さでもいいかと思います。
このように回ります。
次に光ファイバー側です。
モーターとLEDの電池を共有したいところですが、
モーターとLEDを並列に繋ぐと、モータの逆起電力でLEDが7色に変化しません。
モーター逆起電力防止のため、
モーターに並列にダイオードを取り付けても色は変化せず
LEDに直列にダイオードを接続すると7色に変化します。
しかし、ダイオードによる電圧降下分が0.5~0.7V程度あり
LEDにかかる電圧が低く、これまた薄暗くなってしまいます。
そこで、モーターとLEDは別電源とします。
⑦
光ファイバーを照らすLEDはダイソーのLED電球ホルダーから取り出します。
ここに入っているLEDは点滅するように素早く色が変化するため、あまり綺麗ではなく、
連続で色が変化するLEDに取り換えました。
(4.5V電源に抵抗なし状態で繋ぐので、順方向電圧が4.5V以上のLEDを使用)

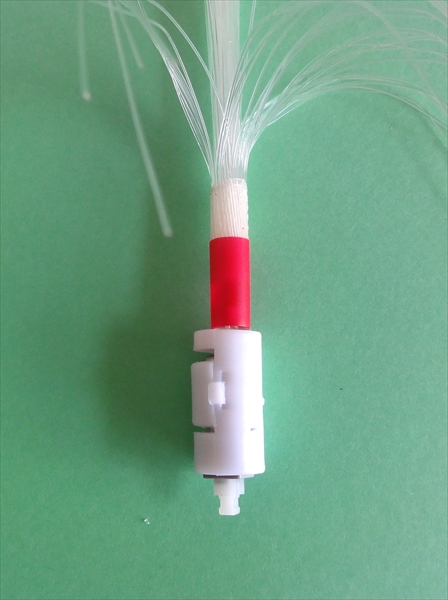
⑧
おもちゃの光ファイバー装置から切り取ったものをセロテープで適当に束ねます。


LEDが当たるところは綺麗に切りそろえます。

⑨
6mmφストローでLEDと光ファイバーを繋ぎ、
⑩
ホットボンド、セロテープで固定します。

⑪
両側に板を貼ります。

⑫
⑥の上部に固定します。

LEDの電池交換のたびに取り外さないといけないですが・・・(^^;
これで完成です。

さて耐久時間ですが・・・
前回作った
<リポパック、12V 60mAモーター、8cmCD、イルミネーションLED使用>の場合は、倒れることなく 1時間33分回り続けました。
今回の装置ですが
回転途中でCDが床にすれるまでの時間を計測したところ、
新品のアルカリ乾電池1本で41分、マンガン電池1本で12分
フル充電したニッケル水素電池1本で 31分でした。
その後、数時間休ませてもう一度回したところ
アルカリ乾電池の場合 30分回り続けました。
(その後 数分の休憩では10分程度でした。)
(その後 数分の休憩では10分程度でした。)
何度か休憩させながら回していくうちに、耐久時間は徐々に減っていき、
いくら休ませても、CDが真っ直ぐ立った状態で回らなくなってしまいます。
モーターに流れる電流が減少して、
コマを真っすぐに回すための回転力を得られなくなったためだと思います。
うまく回るとこんな感じです。
やたらコマの足が短いやん!
って感じですが、重心が低く安定性があるような気もします。
って感じですが、重心が低く安定性があるような気もします。
でもやっぱりコマらしく 足の長いコマも作ってみました。
モーターシャフトと2mmφ×14.5mmシャフトをピニオンギアで接続しています。
この場合は乾電池2個を直列に接続してモーターに繋ぎます。


モーターシャフトと2mmφ×14.5mmシャフトをピニオンギアで接続しています。
この場合は乾電池2個を直列に接続してモーターに繋ぎます。

フル充電したニッケル水素電池 2個直列で
32分30秒、倒れることなく回り続けました。
新品アルカリ乾電池だともう少し長いかも知れないですね。
回るとこんな感じです。
光ファイバーを付けず、コマ装置だけでも面白いかも・・・
これ以外の実験や工作も掲載していますので、
こちらも見てみて下さい。



































